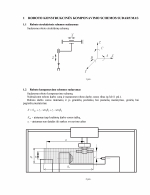
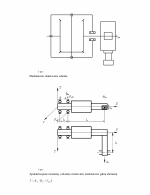
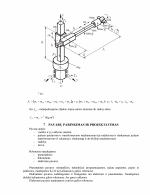
Roboto konstrukcinės komponavimo schemos sudarymas. Roboto struktūrinės schemos sudarymas. Roboto komponavimo schemos sudarymas. Roboto grandžių, greičių bei pagreičių nustatymas. Roboto mechaninis laikymo sistemos skaičiavimas. Orientavimo mechanizmo projektavimas. Griebto projektavimas. Sukimo ir tiesiaeigio poslinkio mechanizmų projektavimas. Pavarų parinkimas ir projektavimas. Elektros variklio parinkimas. Hidraulinių pavarų parametrų nustatymas. Pneumatinių pavarų parametrų nustatymas. Pavaros perdavimo santykio nustatymas. Daviklio parinkimas ir jo kinematinės grandies perdavimo santykio nustatymas.












 121.61 KB
121.61 KB