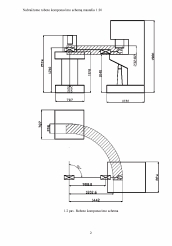
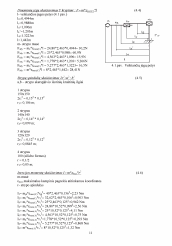
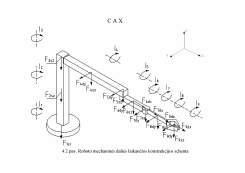
Užduotis: suprojektuoti pramoninį robotą, detalės perkėlimui nuo gręžimo ant frezavimo staklių. Konstrukcinės komponavimo schemos sudarymas. Roboto greičių ir pagreičių apskaičiavimas. ) Laikančiosios konstrukcijos orientacinis skaičiavimas. Laikančios konstrukcijos skaičiavimas nuo visų jėgų. Roboto mechaninė konstrukcija nuo dinaminių jėgų. Išvada. Pavarų skaičiavimas. Pavaros skaičiavimas C koordinatei. Pavaros skaičiavimas A koordinatei. Pavaros skaičiavimas X koordinatei. Pavaros skaičiavimas orientavimo mechanizmui. Sliekinės pavaros projektavimas A koordinatei. Išvada. Guolių skaičiavimas. Guolių skaičiavimui naudojame programą APM Winbear. Išvada. Išvada.









































 694.64 KB
694.64 KB