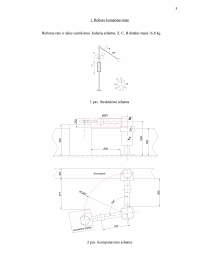
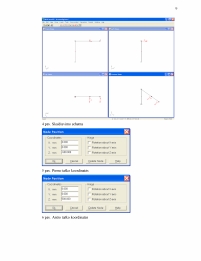
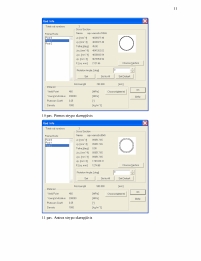
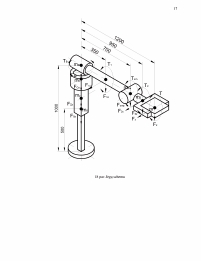
Roboto komponavimas. Struktūrinė schema. Komponavimo schema. Kinematiniai skaičiavimai. Roboto judesių laikai. Detalės eskizas. Orientavimo mechanizmo masė. Mechaninės laikančiosios sistemos projektavimas. Pradinis projektavimas. Skaičiavimo schema. Pirmo taško koordinatės. Antro taško koordinatės. Trečio taško koordinatės. Ketvirto taško koordinatės. Nulinės strypo skerspjūvis. Pirmos strypo skerspjūvis. Antros strypo skerspjūvis. Detalę veikianti jėga. Orientavimo mechanizmą veikianti jėga. Skaičiavimo rezultatai. Didžiausi įtempimai ir deformacija. Įtempimų pasiskirstymo diagrama. Erdvinis konstrukcijos modelis. Patikslintas projektavimas. Jėgų schema. Detalę veikiančios jėgos. Orientavimo pavarą veikiančios jėgos. Pavaras Z, C ir B veikiančios suminės jėgos. Nulinį strypą veikianti jėga. Didžiausi įtempimai ir deformacija. Skaičiavimas su dinamine apkrova. Pavarų projektavimas. Kinematiniai skaičiavimai. Orientavimo pavara. Stipruminiai skaičiavimai. Pavarų skaičiavimai. Veleno skaičiavimas. Guolių skaičiavimas. Skaičiavimo rezultatai. Darbas iliustruotas schemomis, grafikais, brėžiniais ir paveikslėliais.













































 2.63 MB
2.63 MB